Tvorba termální letecké mozaiky města Olomouc
Diplomová práce
Výsledky
Mezi hlavní výsledky práce patří zhotovení dvou termálních mozaik a jedné mozaiky ze snímků pořízených ve VIS. Dalším vykonaným cílem této práce je vytvoření seznamu doporučení, obsahující rady, jak pracovat s termální kamerou a také informace o tom, jakým nejvhodnějším způsobem zpracovávat snímky pořízené termální kamerou.
Kapitola výsledky je rozdělená do tří části. První část se zabývá popisem vytvořených mozaik, druhá se věnuje vzájemným porovnáním termálních mozaik a referenčních ploch. Třetí část je tvořená seznamem doporučení.
Vyhotovení mozaiky
Po dokončení převodu RAW values na teplotu byly následně vyhotoveny mozaiky z dat pořízených během dvou leteckých snímkování. Pro termální mozaiky byly využity snímky pořízené termální kamerou Workswell Thermal Vision. Pro ortofoto mozaiku byly snímky pořízeny kamerou The Phase One iXA-R 180. Všechny mozaiky jsou v plném rozlišený dostupné u vedoucího práce a ve vyšším rozlišení jsou vyhotoveny v přiložených přílohách.
Termální mozaika - ranní
Pro vytvoření termální mozaiky z termálních snímků se po testování rozlišných parametrů ukázalo jako nejúspěšnější použit ty, co jsou uvedeny v tabulce níže.
| Parametr | Hodnota |
|---|---|
| Přesnost | Nejvyšší |
| Preselekce dvojice snímků | Reference |
| Maximální počet klíčových bodů | 25000 |
| Maximální počet vlícovacích bodů | 5000 |
Pomocí parametru Přesnost nastavujeme, jak moc přesně se software snaží určit polohu snímku. Preselekce dvojic snímků určuje, zda má software použít jako vstupní parametr polohu snímků či ne. Hodnota Reference znamená, že ano, má použít polohu zadanou spolu se vstupními daty. Maximální počet klíčových bodů určuje množství bodů, které by mohli být potenciální vázací body na každém snímků. Čtvrtý parametr určuje maximální počet bodů, které budou použitý pro určení sousedních snímků, pokrývajících částečně stejné území (Agisoft LLC., 2016).
V ranním datasetu bylo zarovnáno celkem 734 z 1097 snímků. Pro získání lepších výsledků byly otestovány různé varianty nastavení, včetně změny výškového modelu či vytvoření dalších GCP. Použití dalších GCP se pro tento dataset ukázalo jako nevhodné. Po přidání dalších vlícovacích bodů se zarovnání snímků oproti předpokladům nezlepšilo, ale právě naopak zhoršilo. Počet zarovnaných snímků byl poté přibližně 450.
Pokud se podíváme na obrázek č. XXX zjistíme, že většina zarovnaných snímků se nacházela v zastavěných oblastech. Nejvíce nezarovnaných snímků se nachází ve východní části zájmové oblasti, kde nebyly zarovnány téměř dvě celé letové řady. Další problémová oblast byla severní část zájmového území. Pro zlepšení zarovnání v této oblasti byly vytvořeny další GCP. Po jejich použití se kvalita zarovnání razantně zhoršila a proto bylo od nich upuštěno. V mozaice jsou také dvě mezery, kde nejsou zarovnány žádné snímky. V těchto částech byla snaha pomocí použití více vlícovacích bodů dosáhnout lepšího zarovnání a odstranění těchto mezer. Bohužel tyto mezery se nepodařilo odstranit. Obecně lze vyhodnotit, že zarovnání proběhlo úspěšněji v zastavěných oblastech než v nezastavěných oblastech. Tento stav je nejspíše způsobený nízkým kontrastem snímků z těchto oblastí, které jsou převážně tvořeny lesy, poli či loukami.
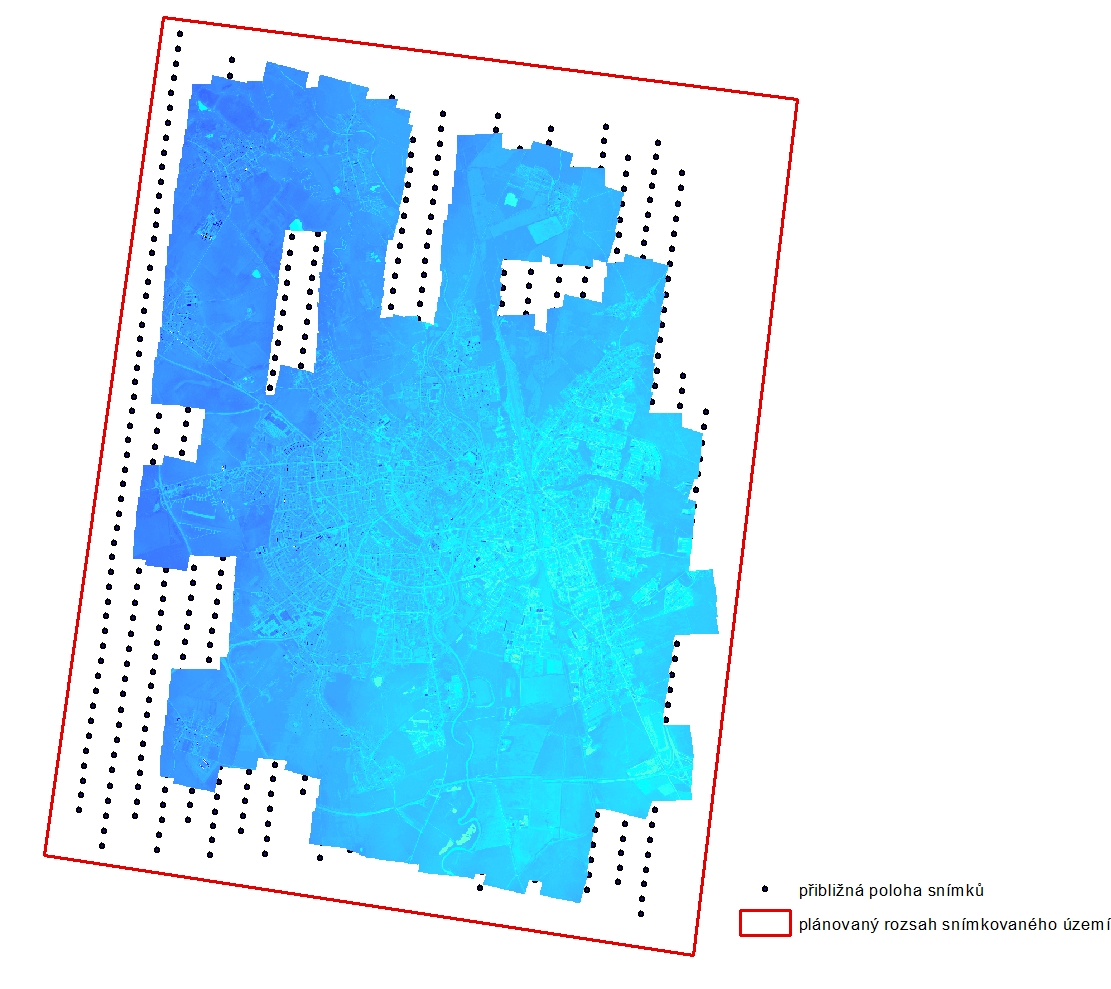
Ve výsledné mozaice můžeme vidět trend postupného oteplovaní území. Tento trend směřuje od severozápadu k jihovýchodu, což je směr, ve kterém bylo snímkování prováděno. Vzhledem k tomu, že snímkování bylo započato těsně po východu slunce, je velmi pravděpodobné, že tento trend je způsoben postupným oteplováním během svítání.
Při bližším zkoumání této mozaiky bylo zjištěno, že obsahuje velké množství artefaktů. Tyto nedostatky jsou způsobeny špatným zarovnáním snímků, chybným výškovým modelem a nevhodně vedenou seamline. Avšak tyto nedostatky nebylo možné odstranit z důvodu malého překryvu. Artefakty se nejvýrazněji projevovaly v oblastech kolem řek či dlouhých rovných silničních či železničních komunikacích.
Pro vzájemné vyhodnocení termálních mozaik byla vybrána oblast centra Olomouce a jeho přilehlého okolí. Oblast slouží jako reprezentativní oblast zájmu. V případě ranních snímků bylo použito pro co nejlepší zarovnání 21 vlícovacích bodů, umístěných v této oblasti. Tímto krokem bylo eliminováno velké množství artefaktů. Vzájemné vyhodnocení je uvedeno v následující podkapitole č. XXX.

Termální mozaika - odpolední
Termální snímky pořízené při odpoledním snímkování jsou výrazně kvalitnější než snímky z ranní datové sady. Na tyto snímky nebylo nutné použít tak výrazné korekce pro zpracování. V nejlepší variantě bylo zarovnáno 792 ze 1158 snímků. Tento počet nebyl nejvyšší ze všech testovaných variant, ale dosahoval nejvyšší obrazové kvality. Celkové zarovnání snímků lze hodnotit jako vyhovující, kromě východní části mozaiky. V této části nebylo zarovnáno přibližně dvě a půl letové řady a ani nebyly zarovnány snímky nacházející se na začátku a konci letových řad. Oproti rannímu datasetu je mozaika celistvá a bez mezer. Pro optimalizaci zarovnání bylo použito 27 vlícovacích bodů, což bylo pro tento dataset dostačující.
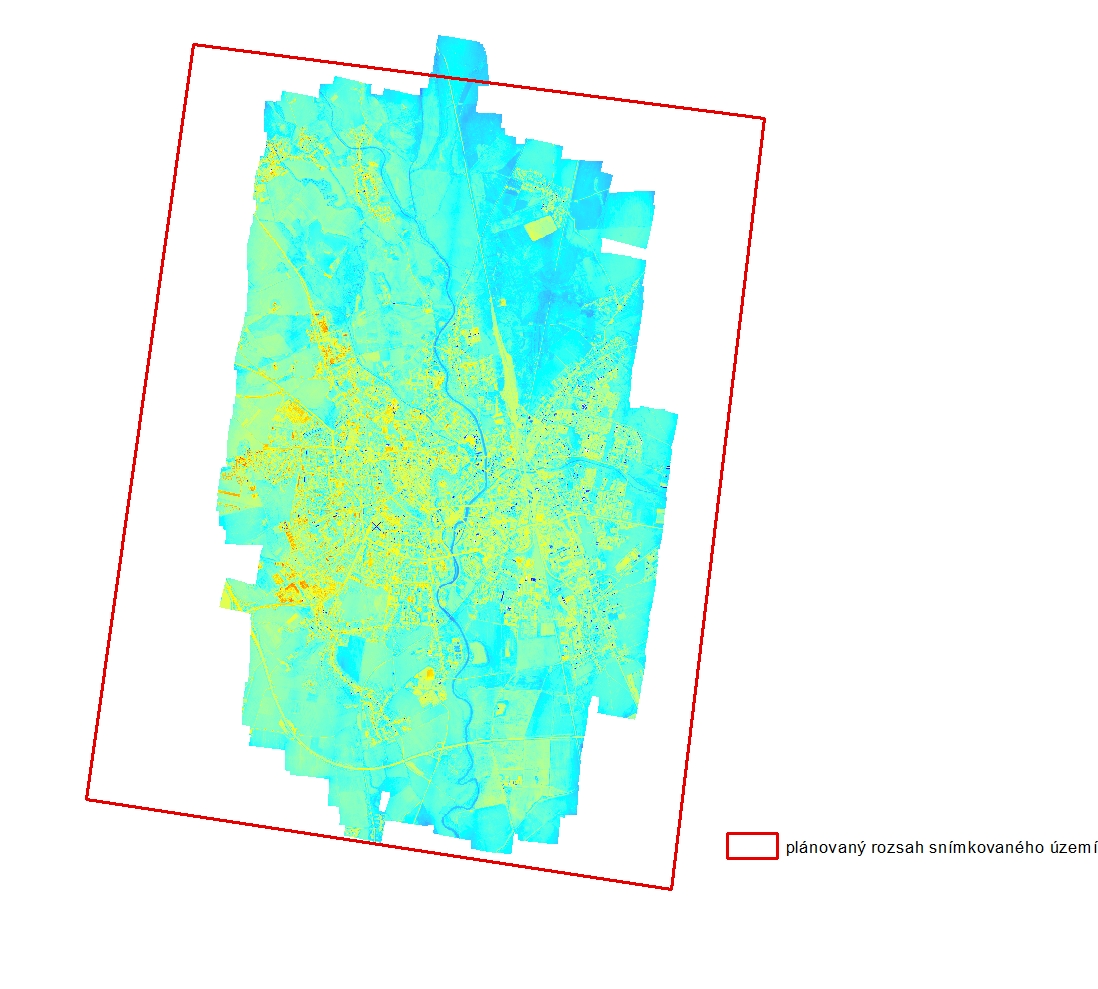
Mozaika obsahuje také množství artefaktů, ale není jich tak velké množství jako u ranního datasetu. V mozaice se nacházejí i chyby způsobené mezerou mezi snímky, jež vznikly nedostatečným překryvem termálních snímků. Tato situace může nastat, pokud se letadlo odkloní od letové linie. Agisoft PhotoScan tyto mezery vyplňuje hodnotami, které spočítá na základě hodnot nacházejících se v okolí mezery. Nutno podoktnout, že tvorba této mozaiky probíhala bez znalosti referenční polohy letadla.
Stejně jako pro ranní dataset byla vytvořená mozaika, která obsahuje pouze území Olomouckého centra a jeho přilehlého okolí. Pro tento účel bylo v tomto území určeno dalších 14 GCP. Tyto body pomohly zpřesnění vytvořené mozaiky a následně byly použity také pro zarovnání mozaiky celého zájmového území.
Snímky ve VIS
Snímky ve viditelné části elektromagnetického spektra byly pořízeny pouze při odpoledním snímkování. Při ranním náletu by snímkování ve VIS nebylo jakkoliv užitečné z důvodu postupného rozednívání. Snímků bylo pořízeno 1606, kdy byly při snímkování vynechány první dvě letové řady z důvodu nedostatečné kapacity paměťového uložiště.
Pro zarovnání snímků byla zvolena vysoká přesnost zarovnání. Zarovnány byly všechny snímky a následně byla pomocí DMR 5G vygenerována ortofoto mozaika. Pro optimalizaci polohy snímků bylo využito 14 vlícovacích bodů, které byly zaměřeny v terénu pomocí GNSS přijímače.
Při vizuální kontrole bylo zjištěno, že mozaika také obsahuje chyby, vzniklé při spojování snímků v okolí seamlines. Tyto nedostatky jsou nevýhodou použití softwaru Agisoft PhotoScan, který vytváří mozaiku z velkých relativně pravidelných častí snímků. Většina těchto nedostatků byla odstraněna primárně v oblasti města Olomouce, jako hlavního zájmového území. Po dokončení těchto kroků vznikla mozaika s průměrnou chybou RMSE 0,29 px. Tento údaj byl automaticky softwarem, ve kterém byla mozaika vytvářena.

Všechny následující hodnocení jsou pro bodové měření nikoliv pro plošné, proto se mohou od jiných naměřených dat lišit. K vyhodnocení termálních mozaik byly vybrány 2 přístupy. V první variantě byla porovnána získaná teplota z terénního referenčního měření a teplota získaná z vytvořené mozaiky. Pro druhý přístup bylo náhodně vygenerováno 29 bodů kterým byla přiřazena bodová hodnota z vytvořených termálních mozaik, pomocí kterých byl porovnán vývoj teploty mezi jednotlivými lety. Dále byly porovnány teploty referenčních povrchů získané z in-situ měření a termálních mozaik. Všechny podklady pro toto vyhodnocení se nachází v příloze č. XXX v textu práce.
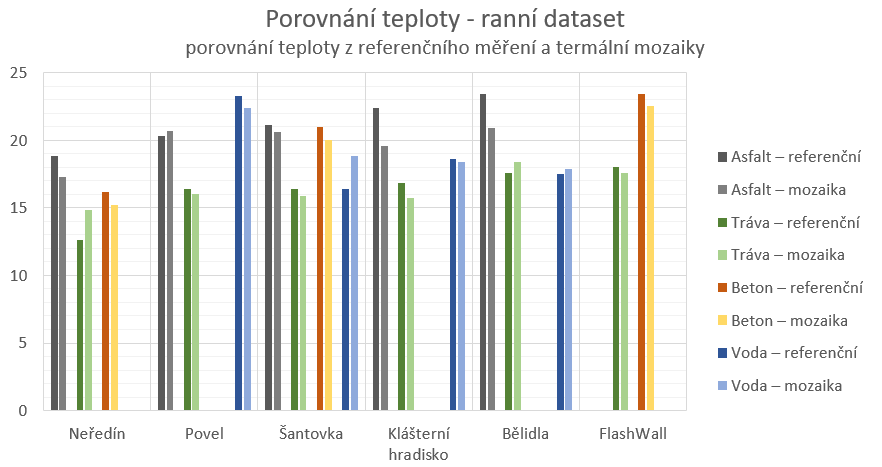
V grafu č. XXX můžeme vidět porovnání získaných teplot povrchů z referenčního měření a z termální mozaiky. Při bližším prozkoumání tato data nevykazují žádný shodný trend. Pouze pro asfaltový povrch můžeme vidět postupný růst teploty povrchu s postupujícím časem měření, a to konkrétně při referenčním měření. Teplota asfaltu získaná z mozaiky však tento růst nekopíruje. Další umělý povrch v tomto měření byl beton. Ten vykazuje rostoucí teplotu po celou dobu snímkování včetně velmi podobné teploty v rámci jednoho stanoviště. Teplotu vody nelze porovnávat mezi stanovišti, protože jsou to rozdílné toky/nádrž. Z grafu lze vyčíst, že proudící voda je chladnější než stojatá. Průměrná odchylka teploty získané z referenčního měření a termální mozaiky je přibližně 1,1 °C.
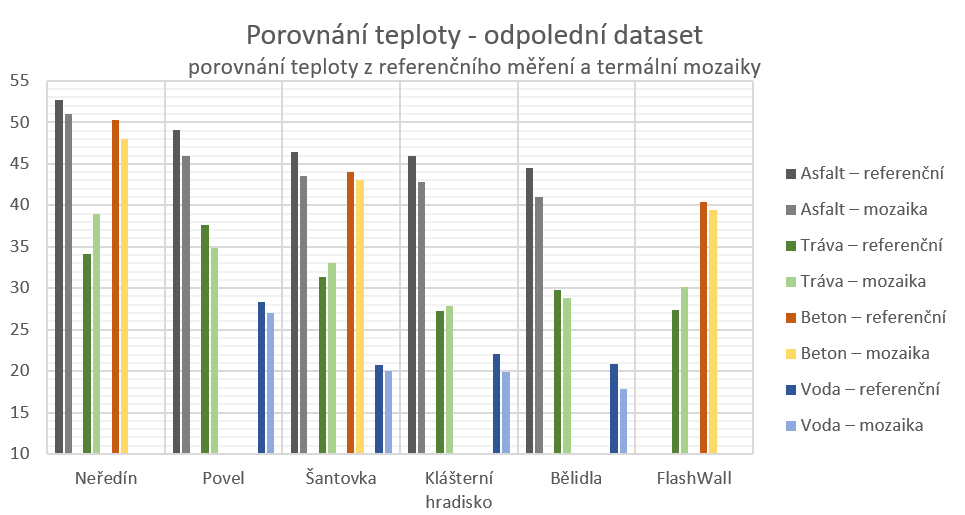
Při porovnání referenčního měření a odpoledního termálního datasetu v grafu č. XXX lze vidět klesající teplotní trend. Pro odpolední datovou sadu byla zjištěna průměrná odchylka teploty z referenčního měření a termální mozaiky přibližně 1,88 °C. Odchylka je relativně zanedbatelná z důvodu přesnosti kamery. Přesnost použité termální kamery je do 2 °C.

Vygenerované body se nacházejí na několika typech povrchů, které byly rozděleny do následujících kategorií: Asfalt, Beton, Kočičí hlavy, Střešní krytina Štěrk, Voda, Zeleň a Ostatní. Při vyhodnocování ohřívání povrchu během dne bylo dle předpokladu zjištěno, že nejvíce se ohřívají takzvané umělé povrchy. Mezi ty patří asfalt, beton i střešní krytina. Pro asfalt byl zjištěn průměrný teplotní rozdíl mezi snímkováním 20,4 °C. V bodech 8 a 24 byly zjištěny výrazné odchylky přibližně o 7°C. Zbytek hodnot se pohybuje v rozmezí +- 3 °C. V kategorii kočičí hlavy (kámen) byly stanoveny 2 body, které vykazovaly podobnou odchylku jako umělé povrchy, což činí přibližně 17,5 °C.
Zajímavé porovnání je zelení. Do této kategorie spadají stromy a tráva a ostatní zeleň. Tento povrch se ohřál maximálně na 28,1 °C, což je v porovnání s například asfaltem, který dosahoval hodnoty až 49,8 °C, významný rozdíl. Průměrné ohřátí povrchu pokrytého zelení je 9 °C, což je více než poloviční hodnota oproti asfaltu.
V kategorii voda byl zaznamenán naopak pokles teploty. Důvod této změny nebyl zjištěn. Další kategorie byla střešní krytina. Tuto kategorii můžeme rozčlenit dle použitého materiálu. Pokud máme například plechovou střechu, tyto hodnoty nelze brát v potaz, pokud neprovedeme převod z RAW values na teplotu s klasifikovanou emisivitou pro každý povrch. Plechové střechy vykazují tzv. cold spots, díky nízké emisivitě. Cold spots jsou teplotní anomálie, kdy objekty se jeví jako velmi chladné vůči svému okolí (JELÍNEK, 2008). Tento jev lze vidět na bodě č. 10. V kategorii ostatní jsou zařazeny plochy, které obsahují více druhů povrchů. Tyto plochy nelze objektivně vyhodnotit.
Doporučení pro práci s termální kamerou a pro zpracování termálních snímků
V této diplomové práci byla poprvé použita nová termální kamera, která byla pořízena na Katedru Geoinformatiky UPOL. Právě proto byl v zadání práce stanoven cíl vypracování technických doporučení pro práci s touto kamerou a dále i zpracování termálních snímků, které byly pomocí ní pořízené. Tento seznam doporučení slouží pro zlepšení a ulehčení další práce s touto kamerou a také pro vyvarování se některých chyb, které mohou vzniknout nevhodným použitím kamery. V následující části je vždy uvedeno doporučení a následně jeho odůvodnění.
Překryv
Pří plánování letecké kampaně je třeba se vyvarovat několika chybám. Pro termální snímkování je nutné použít velký (dostatečný) přeryv. Jako doporučovaný je uváděn minimální podelný překryv 80 % a 60 % pro příčný překryv. Tento vysoký překryv napomáhá lepšímu zarovnání snímků a zároveň lze použít při tvorbě mozaiky oblast středu snímků. Střední část snímků jednak nepodléhá tak velkému zkreslení, ale také se zde neprojevuje tak velký efekt vinětace. Případně lze při velkém překryvu nekvalitní snímky vynechat. Nekvalitní snímky jsou například snímky rozmazané, či snímky obsahující neobvyklý tvar vinětace atd.
Umístění kamery
S vinětací souvisí další jev. Kameru je vhodné umístit na letadlo tak, aby za letu směřovala kolmo k zemskému povrchu. Je jasné, že tuto polohu vůči zemskému povrchu nelze dodržet z důvodu pohybu letadla, které je také ovlivněno atmosférickými vlivy. Ale pokud kamera není umístěná kolmo k povrchu, vinětace má mírně jiný tvar a je náročné jí modelovat a poté pomocí vytvořené masky dostatečně odstranit.
Čas záverky
Dále je dobré zjistit, jak dlouhý čas závěrky kamera používá a podle toho je nutné podřídit rychlost letadla při snímkování. Pokud rychlost bude příliš vysoká, může docházet ke smazu na snímcích.
Denní doba (vhodné pro naplánování letu)
Při snímkování termální kamerou je také podstatné zvolit vhodnou denní dobu pro pořízení leteckých dat. Nejprve je nutné si stanovit pro jaké využití snímky pořizujeme. Pro každé využití se hodí jiná denní doba snímkování. Pokud je například budeme využívat pro výzkum tepelného ostrova města je potřeba snímkovat toto místo, když vyzařuje nejnižší a nejvyšší teplotu během jednoho dne. Tato teplota je vždy dosažena v jinou denní dobu během celého roku.
Kalibrace + načasování
Když kameru spustíme, začne se automaticky v pravidelných intervalech provádět rekalibrace kamery. Tato kalibrace spočívá v uzavření clony a její nasnímání. Clona zde slouží jako homogenní kalibrační plocha. Tento proces slouží ke kalibraci senzoru, který mohl být částečně silně ozářen a tím by měřil nepřesné hodnoty v těchto místech. Interval kalibrace kamery lze volitelně nastavit a je důležité, aby toto číslo nebylo stejné jako frekvence snímkování nebo aby nebylo jeho násobkem. Vždy když v průběhu snímkování nastane situace, kdy se ve stejnou dobu má pořídit snímek a zároveň kalibrace, vždy je pořízení snímku o jednu sekundu posunuto. To zapříčiňuje například zmenšení překryvu.
Testování termální kamery
Před provedením letecké kampaně je vhodné kameru nejdříve otestovat. Toto testování můžeme provádět pomocí několika metod. Pokud máme přístup ke komoře s absolutně černým tělesem nebo k termálnímu článku s regulovatelnou teplotou můžeme pro testování využít tyto přístroje. Pokud ale nemáme přístup k těmto přístrojům, lze využít postup využívající pouze vodu a led. Postup pro tyto druhy testování je uveden výše.
Optimální atmosférické poruchy
Termální záření dopadající na senzor je vždy ovlivněno průchodem atmosférou. Tento vliv atmosféry lze modelovat a následně jej odstranit. K tomuto účelu můžeme využít několik druhů korekcí popsaných v kapitole XXX. Abychom omezili vliv atmosféry na minimum, je vhodné snímkovat v optimálních podmínkách. Vliv atmosféry zejména ovlivňuje vzdušné proudění a vzdušná vlhkost, proto je vhodné vybírat dobu či den, kdy je bezvětří s co nejnižší vlhkostí. Dále samozřejmě nelze snímkovat za deště anebo při mlze či při podobných podmínkách. Obecně platí skoro stejná omezení pro snímkování jako pro snímkování ve VIS.
Získání záznamu letu
Při zpracování termálních leteckých snímků je vhodné znát také polohu letadla při pořízení snímku. Tyto data lze získat například z inerční jednotky kombinované s GNSS přijímačem umístěným na palubě letadla či případně lze využít i mobilní telefon s GPS přijímačem pořizující záznam polohy během letu. Software jako Agisoft PhotoScan či Pix4Desktop umí s těmito daty pracovat a lze je použít pro zlepšení zarovnání snímků.
Kontrola zpracování hodnot při snímkování
Během snímkování je také nutné kontrolovat, zda jsou pořízená data správná. Lépe řečeno, zda dosahují hodnot v předpokládaném rozmezí. Tuto kontrolu lze provádět například pomocí připojeného externího displeje. Pokud hodnoty nespadají do předpokládaného intervalu hodnot je nutné kameru restartovat a zkontrolovat, zda hodnoty jsou již v pořádku. UPOZORNĚNÍ: Toto řešení není ověřené, vzniklo po konzultaci s konzultantem Markem Pivovarníkem.
Referenční měření
Pro kontrolu kvality provedených korekcí, či ověření správnosti naměřených hodnot, je vhodné provést během snímkování také referenční měření. Při měření je vhodné dbát na rozmístění referenčních ploch po celém zájmovém území. Dále také na to, aby bylo v místě měření co nejvíce druhů povrchů, které jsou postupně snímány či měřena jejich teplota. Toto měření lze provést pomocí ruční termální kamery nebo pomocí kontaktního či bezkontaktního teploměru.
Převod RAW values na radiační teplotu
Při převodu RAW values na teplotu je důležité si stanovit algoritmus, pomocí kterého získáme výslednou radiační teplotu. Pro mono-window algoritmy je důležité stanovit co nejpřesněji hodnotu emisivity pro každý prvek (viz kapitola XXX). Poté je také podstatné získat informace o atmosférických podmínkách, za kterých byly termální snímky pořízeny. Tyto údaje vstupují do atmosférických a radiometrických korekcí při převodu RAW values na radiační teplotu.
Použitý software
Při vytváření mozaik je třeba také použít vhodný software. Pro vytvoření mozaiky z termálních snímků pořízených pro tuto práci, byl vybrán jako nejvhodnější Agisoft PhotoScan. Pokud jsou snímky pořízeny s velkým překryvem (70–80 %) či máme záznam z letu, lze použít také Pix4Desktop nebo ho alespoň zvážit či otestovat, zda výsledky nebudou vhodnější.
Odstraňování nedostatku z vytvořené mozaiky
Jak bylo již výše zmíněno, na vytvářené mozaice vznikají také obrazové vady, tzv. artefakty. Tyto artefakty lze v Agisoft PhotoScan odstranit ohraničením problémové oblasti polygonem a následně vybráním snímku, který nahradí vadnou část mozaiky. Při použití tohoto postupu není vhodné označit pouze problémovou oblast, ale spíše nějaký celek. Může se jednat pouze o jednu budovu nebo rovnou celý blok budov. Dále je vhodné kontrolovat výškové budovy, včetně kostelů, kdy velmi často tyto budovy mají „useknuté“ věže či vrcholky budovy.