Analýza břehových nátrží pomocí geodetických metod
Metody měření
Při sběru dat v terénu byly použité různé metody měření. Zde si můžete přečíst stručné informace o jednotlivých metodách:
Fotogrammetrie
Fotogrammetrie je metoda bezkontaktního určování objektových souřadnic a řadíme ji mezi vědní obory. Je to zdroj primárních informací o předmětech, které získáváme exaktním bezkontaktním měřením. Slovo fotogrammetrie pochází z řečtiny a jedná se o složení slov fotos – světlo, gramma – záznam a metrie – měření. V závislosti na změnách využívání výsledků a zlepšování použitých technologií, v průběhu doby, se můžeme setkat s různými definicemi fotogrammetrie (Pavelka, 2002). Jedna z definic zní: „Fotogrammetrie je vědní obor zabývající se získáváním informací (především geometrických vztahů) z obrazových záznamů (nejčastěji měřičských snímků).“.
Základem tradiční fotogrammetrie je fotografický záznam, který můžeme pořídit klasicky analogovou formou nebo dnes častějším digitálním způsobem. Pro toto pořízení záznamu lze využít speciální měřičské komory nebo taky běžné amatérské fotoaparáty. Pořízený snímek zobrazuje zachycenou realitu. Z poloh bodů na snímku je možné vyhodnotit polohopis a výškopis nebo odvodit tvar, velikost a umístění předmětu. (Pavelka, 2002).
V počátcích fotogrammetrie byl využíván jen princip pozemní průsekové fotogrammetrie. V padesátých letech 20. století byl objeven a začal se používat princip stereoskopie a letecké snímkování. Tyto nové principy měli za následek vývoj analogových přístrojů pro vyhodnocení snímků. S rozvojem digitální techniky se postupně přestala používat analogová metoda a přešlo se na metodu digitální (Šimíček, 2012). Tato technologická změna odstartovala nový způsob nejen zpracování snímků, ale také způsobu využívání metody fotogrammetrie.
Dle K. Pavelky (2002) můžeme fotogrammetrii dělit podle:
- polohy stanoviska ,
- počtu a konfigurace vyhodnocovaných snímků ,
- technologického způsobu zpracování,
Structure from motion
Relativně mladá fotogrammetrická metoda, která je levná a má efektivní a flexibilní přístup k zachycení složité topografie. Structure from Motion (SfM) je postavena na základních principech stereoskopické fotogrammetrie s kombinací metody průsekové fotogrammetrie. Což znamená, že 3D model objektu vznikne pomocí vzájemného překrývání snímků, které mají kombinaci rovnoběžných a konvergentních os záběrů. Konkrétně se jedná o zobrazovací techniku, která a je založena na vytváření trojrozměrné struktury z dvourozměrných obrazových sekvencí, které jsou spjaty s pohybem nosiče (Šimíček, 2014).
Na rozdíl od běžné fotogrammetrie provádí SfM výpočty geometrie scény i pozici a orientaci kamery zcela automaticky. Ty jsou počítány pomocí redundantních nastavených procesů založených na databázi prvků, které jsou automaticky extrahovány ze sady několika překrývajících se snímků. Tento způsob zpracování je vhodný pro sadu snímků s vysokým stupněm překrytí (M. J. Westoby a kol., 2012). Metoda Structure from Motion je založena na principu faktorizace (rozkladu). Cílem metody je kombinovat body korespondující informace pořízených z různých míst, tak aby byla na základě pohybu kamery rekonstruována struktura scény. Zápornou stránkou této metody jsou vysoké výpočetní nároky.
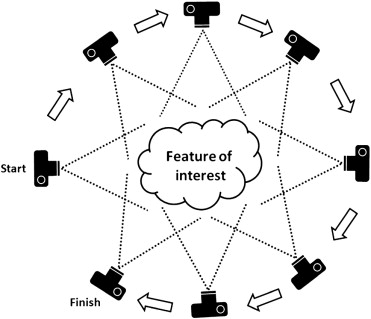
Obr 1: Princip pořízení snímků metodou Structure from Motion (zdroj M. J. Westoby, 2012).
Elektronická tachymetrie
Obecně se tachymetrie využívá pro měření polohopisu a výškopisu. Elektronická tachymetrie využívá pro určení přesné polohy bodů měření pomocí polárních souřadnic (vodorovný úhel a dálka). Výpočet se provádí polární metodou a je definována vztahy (Koska, 2003).
U elektronické tachymetrie se využívají elektronické tachymetry s odrazným hranolem (reflektorem). Hranol je umístěný na výsuvné výtyčce. Elektronické tachymetry disponují vysokou přesností při dálkovém měření a také velkým dosahem.
Principy určování polohy pomocí GNSS
Pro určení polohy a času využívají systémy GNSS třech základních principů měření kódové, fázové a Dopplerovské.
Kódová měření
K určení vzdálenosti mezi družicemi a přijímačem slouží tzv. dálkoměrné kódy neboli časové značky. Tyto značky vysílá každá družice na oběžné dráze. Systém GPS NAVSTAR využívá tyto kódy: C/A kód, P-kód a Y-kód (slouží pro vojenské účely). Pomocí dálkoměrných kódů přijímač dokáže určit čas, kdy byla odeslána kterákoliv část signálu vyslaného družicí (Rapant, 2002, s. 31). V dalších krocích přijímač určí kód a zjistí čas odeslání. Tento čas poté porovná s časem přijetí jedné sekvence kódu a z časového rozdílu určí vzdálenost mezi družicí a přijímačem.
Fázová měření
Oproti kódovému měření (využívá dálkoměrné kódy) zpracovává vlastní nosné vlny. Jelikož je problematické určit čas odeslání nosné vlny, vykazuje fázové měření určitou nejednoznačnost, tzv. ambiguity. Tato nejednoznačnost je rovna počtu vlnových délek nosné vlny, jenž se nachází mezi přijímačem a družicí na počátku měření. To co přijímač dokáže přesně určit je desetinná část nosné vlny. Když je určena počáteční hodnota celočíselné nejednoznačnosti, přijímač tuto hodnotu udržuje. K této hodnotě následně jen dopočítává celý počet vlnových délek v závislosti na změně vzdálenosti mezi přijímačem a družicí.
Dopplerovská měření
Principem měření je využití Dopplerovského posunu frekvence, který je měřen na nosné vlně. Přijímaná frekvence signálu je průběžně měněna. Tato změna je způsobena relativním pohybem družice vůči přijímači. Dopplerovský způsob měření lze použít k určení polohy, ale především se v praxi využívá k určení rychlosti, jakou se přijímač pohybuje.
Katedra Geoinformatiky Univerzity Palackého v Olomouci, 2015
Design by:Free Website Templates